R&D ACTIVITIES
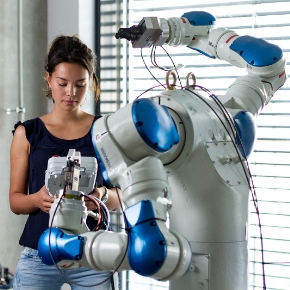
Robotic handling and effectors
- Research and development in the field of robotic handling of less common objects due to their weight, temperature, fragility, shape instability, or shape complexity, or special environments such as elevated temperatures, dustiness, or vacuum.
- Development and system integration of handling devices and industrial robots into robotic technological workplaces.
- Research and development of new types of effectors (gripping and technological heads) for robots, mechanical and vacuum grippers, and optimisation of flexible adaptive gripping heads.
- Implementation of elements with a high degree of intelligence and new materials into robotic systems, mechatronic systems with multiple degrees of freedom and standard drive topologies.
- Research, development, and implementation of advanced technologies in the field of automation technology, electrical engineering, electronics, and robotics for engineering and non-engineering applications.
- Research and development support using numerical simulations.
- Performance of strength calculations of critical machine nodes, including creation of kinematic and dynamic models of mechatronic systems.
Service robotics and mechatronic systems for specific applications
• Application of service robots for difficult and specific surfaces, under difficult conditions, in areas with a dangerous environment.
• Research and development of mechatronic systems for health and health rehabilitation purposes (orthosis).
• Development of single-purpose machines and mechatronic devices for specific professional applications (such as ice removal).
• Research and development support using numerical simulations.